1. 歩行支援機器
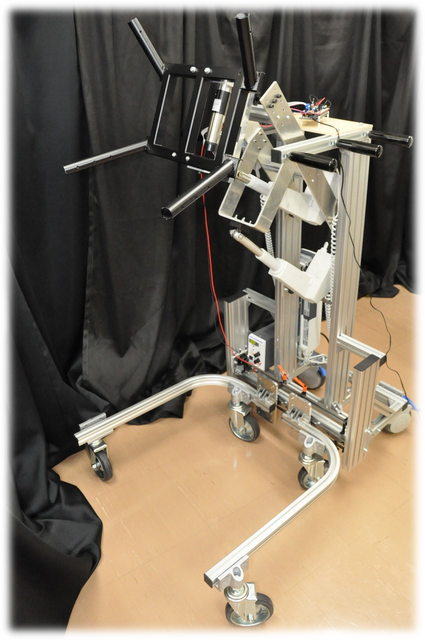
①一軸フリー回転可能な胸部支持パッドを有する歩行車
高齢者の立ち上がりと歩行を支援するため,現在さまざまな免荷式リフトが開発され,商品化されている。利用者の歩行意欲の向上を積極的に図るため,胸部支持パッドに1自由度のフリー回転ジョイント機構を新たに加えたリフト型歩行車が㈱ミハマより試作された。この歩行車では,腰部のスイングを1軸フリー回転機構により自然に引き出し,腰部につけられているベルトを介して足を引っ張ることによって歩行促進を図ることを特色としている。しかしながら,歩行車は市販品モデルを改良したものであり,センサ類を有していないため,胸部支持パッドの回転角度と傾斜角度の情報および胸部支持パッドに掛かっている圧力の情報を直接に計測できず,歩行促進の評価と影響要因の解析は困難である。

そこで本研究では,歩行促進効果の評価およびその影響要因を明らかにするため,角度センサと圧力センサを取り付けることを前提とした胸部支持パッドを含んだ新しい歩行車の設計と試作した。また,新型歩行車を用いて歩行計測を行い,歩行中の支持パッドの回転角と利用者体幹部の姿勢変化による圧力および下肢運動などの情報を測定し,その関連を解析することで新型歩行車の効果を評価する。
②駆動型胸部支持パッドを有する歩行車の開発と歩行促進効果の評価
 下肢部の弱い高齢者の自立歩行を支援するため、様々な歩行支援機器が商品化されているが、利用者の歩行意欲の向上を積極的に図るものはない。これまでに1自由度フリー回転機構付きの胸部支持パッドを有する歩行車を試作し、歩行運動の特徴を定量的に評価した。利用者が歩行する際に、胸部支持パッドの回転により利用者腰部のスイングが自然に引き出され、ベルトを介して足が引っ張られることによって利用者の歩行意欲を促す。しかしながら、従来の胸部支持パッドの回転は受動的な機構であり、病気で足が踏み出せない高齢者には利用できない。
下肢部の弱い高齢者の自立歩行を支援するため、様々な歩行支援機器が商品化されているが、利用者の歩行意欲の向上を積極的に図るものはない。これまでに1自由度フリー回転機構付きの胸部支持パッドを有する歩行車を試作し、歩行運動の特徴を定量的に評価した。利用者が歩行する際に、胸部支持パッドの回転により利用者腰部のスイングが自然に引き出され、ベルトを介して足が引っ張られることによって利用者の歩行意欲を促す。しかしながら、従来の胸部支持パッドの回転は受動的な機構であり、病気で足が踏み出せない高齢者には利用できない。そこで本研究は、利用者の歩行意欲を能動的に促進できる駆動型胸部支持パッドを有する歩行車を開発すると同時に、歩行バイオメカニクスの観点から歩行車補助効果の新しい評価手法を提案することを目的とする。
※本研究関連の特許が取得済である。(特許→)
2.力感覚の提示と認知
ハプティックインタフェースとは,操作者に力感覚を提示するバーチャルリアリティ(VR)装置である.ハプティックインタフェースは遠隔操作時に遠方作業の接触状況を忠実に操作者に提供することができるため、宇宙開発での遠隔操作、遠隔医療・福祉介護などの様々な応用ができる。しかし、人間がどのように力感覚、触覚を知覚するかという人間の知覚メカニズムにおいて解明されていない課題が多く、本研究室では以下の研究を行っている。
①手首型三軸ウェアラブルハプティックデバイスの開発
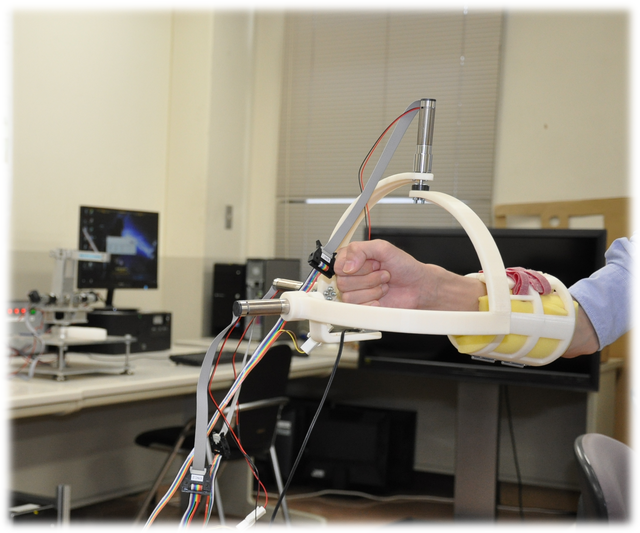 遠隔操作機器の操作する際に力感覚情報を操作者にフィードバックすることによって感覚的に操作することが可能となり,作業効率や安全性が向上することで医療福祉分野への応用が期待できる。また,VR空間の仮想オブジェクトに触れた感触を提示し,カメラやスピーカーで提示する視覚・聴覚情報と合わせることで,操作者は実際に物体に触っているかのような感覚を得ることができ,ジョブトレーニングやアミューズメントへの応用が期待できる。現在利用されているハプティックデバイスは,大型の機構や可動域の制限などにより水平な台などに固定して利用し,屋内で使用する想定のものが多い。本研究では,操作者の手首へ3軸回転方向の力覚を提示する上肢着用できるハプティックデバイスの開発を行う。
遠隔操作機器の操作する際に力感覚情報を操作者にフィードバックすることによって感覚的に操作することが可能となり,作業効率や安全性が向上することで医療福祉分野への応用が期待できる。また,VR空間の仮想オブジェクトに触れた感触を提示し,カメラやスピーカーで提示する視覚・聴覚情報と合わせることで,操作者は実際に物体に触っているかのような感覚を得ることができ,ジョブトレーニングやアミューズメントへの応用が期待できる。現在利用されているハプティックデバイスは,大型の機構や可動域の制限などにより水平な台などに固定して利用し,屋内で使用する想定のものが多い。本研究では,操作者の手首へ3軸回転方向の力覚を提示する上肢着用できるハプティックデバイスの開発を行う。
②力感覚の提示と力知覚メカニズムの解明
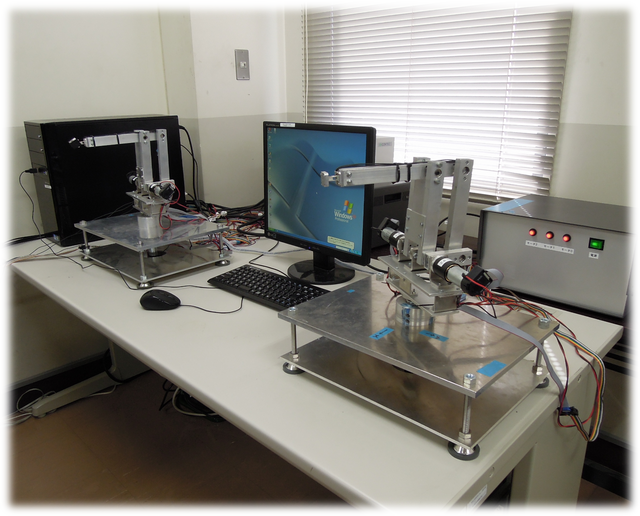 一般に,人間に力感覚や触覚を提示するため,ハプティックデバイスという力感覚提示装置を利用することは多い。ハプティックデバイスとはバーチャルリアリティ技術の一種であり,計算機のなかに予め作られた仮想世界の動きに合わせて操作者にさまざまな力感覚や触覚を作り出す小型ロボットである。ハプティックデバイスを用いることにより,物理的な制限条件を除去し,仮想対象物を数学的に簡単に作成することが可能となる。また,この手法では同時に操作者の運動データも蓄積できるという利点があり,従来の認知学や心理学に用いられた厳しい実験条件を容易に実現できる。
一般に,人間に力感覚や触覚を提示するため,ハプティックデバイスという力感覚提示装置を利用することは多い。ハプティックデバイスとはバーチャルリアリティ技術の一種であり,計算機のなかに予め作られた仮想世界の動きに合わせて操作者にさまざまな力感覚や触覚を作り出す小型ロボットである。ハプティックデバイスを用いることにより,物理的な制限条件を除去し,仮想対象物を数学的に簡単に作成することが可能となる。また,この手法では同時に操作者の運動データも蓄積できるという利点があり,従来の認知学や心理学に用いられた厳しい実験条件を容易に実現できる。
一方,ハプティックデバイスを用いてより現実に近い力感覚を操作者に提示するためには,さまざまな技術的な問題を解決する必要がある。本研究室は以下の研究を行っている。
(1)ハプティックデバイスの機構や制御などの実現手法
(2)人間の力感覚メカニズムの解明
3. 切り替え可能な内視鏡手術鉗子の開発
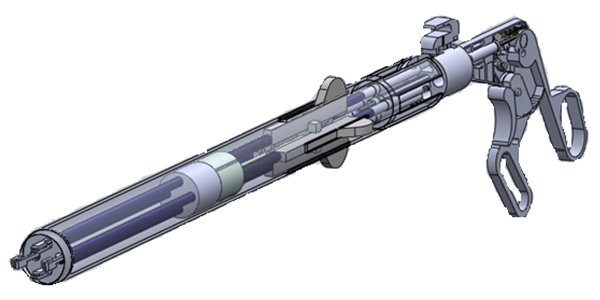 内視鏡手術は低侵襲であり、患者への身体負担が少ないため、近年内視鏡手術の年間件数は伸び続けている.一方、
市販されている内視鏡鉗子を使用した内視鏡手術では,何本もの内視鏡鉗子をトラカールへ抜き差しをする動作が必要である.トラカールの入り口は狭いため抜き差しの動作にも細かい動きと集中力が必要であり,執刀医への精神的負担が大きい.長時間手術を行う場合では身体的負担もさらに大きくなると考えられる.
そこで、本研究は切り替え可能な内視鏡手術用鉗子という新しいコンセプトを提案する.本提案の内視鏡手術器具を実現することによって、よりスピーディかつ安全に手術を行えるように医師の手助けを期待できる。
内視鏡手術は低侵襲であり、患者への身体負担が少ないため、近年内視鏡手術の年間件数は伸び続けている.一方、
市販されている内視鏡鉗子を使用した内視鏡手術では,何本もの内視鏡鉗子をトラカールへ抜き差しをする動作が必要である.トラカールの入り口は狭いため抜き差しの動作にも細かい動きと集中力が必要であり,執刀医への精神的負担が大きい.長時間手術を行う場合では身体的負担もさらに大きくなると考えられる.
そこで、本研究は切り替え可能な内視鏡手術用鉗子という新しいコンセプトを提案する.本提案の内視鏡手術器具を実現することによって、よりスピーディかつ安全に手術を行えるように医師の手助けを期待できる。
※本研究関連の特許が取得済である。(特許→)
4. 冗長ロボットのモーション制御
①可操作度を用いた自由空間でのフィンガ・アームロボットの運動制御
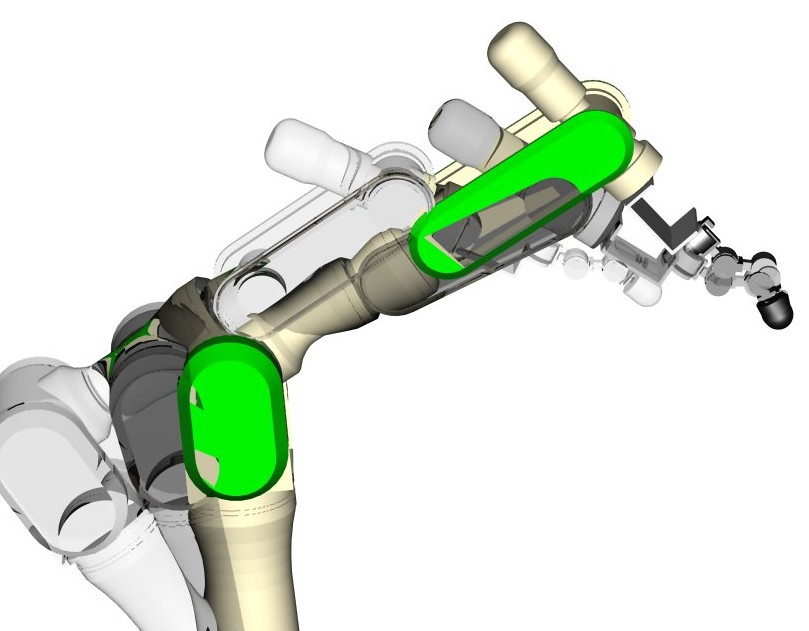 人間は上肢を動かす時、目標とする動作に合わせて指や腕の有する自由度を活かしながら、それらをうまく使い分けることができる。具体的には何かの動作を行う時、細かい動作には指を、大きな動きを必要とする動作には腕を主に動かして対応する。本研究室ではこのような人間の行う滑らかで自然な動作の切り替えを、人間の上肢に近い冗長性を有するフィンガ・アーム冗長ロボットで実現させることを目的としている。
人間は上肢を動かす時、目標とする動作に合わせて指や腕の有する自由度を活かしながら、それらをうまく使い分けることができる。具体的には何かの動作を行う時、細かい動作には指を、大きな動きを必要とする動作には腕を主に動かして対応する。本研究室ではこのような人間の行う滑らかで自然な動作の切り替えを、人間の上肢に近い冗長性を有するフィンガ・アーム冗長ロボットで実現させることを目的としている。
具体的には、フィンガ・アームロボットの冗長自由度を用いてフィンガ部の可操作度を閾値以上に保つため、フィンガ・アームの協調運動を生成するというヒューリスティック的な手法を提案した。また、フィンガの可操作度をなるべく速く上昇させることを実現するため、最適化理論の代表的な最急上昇法を適用したアルゴリズムを提案した。
②可操作度を適用したフィンガ・アームロボットのインピーダンス制御
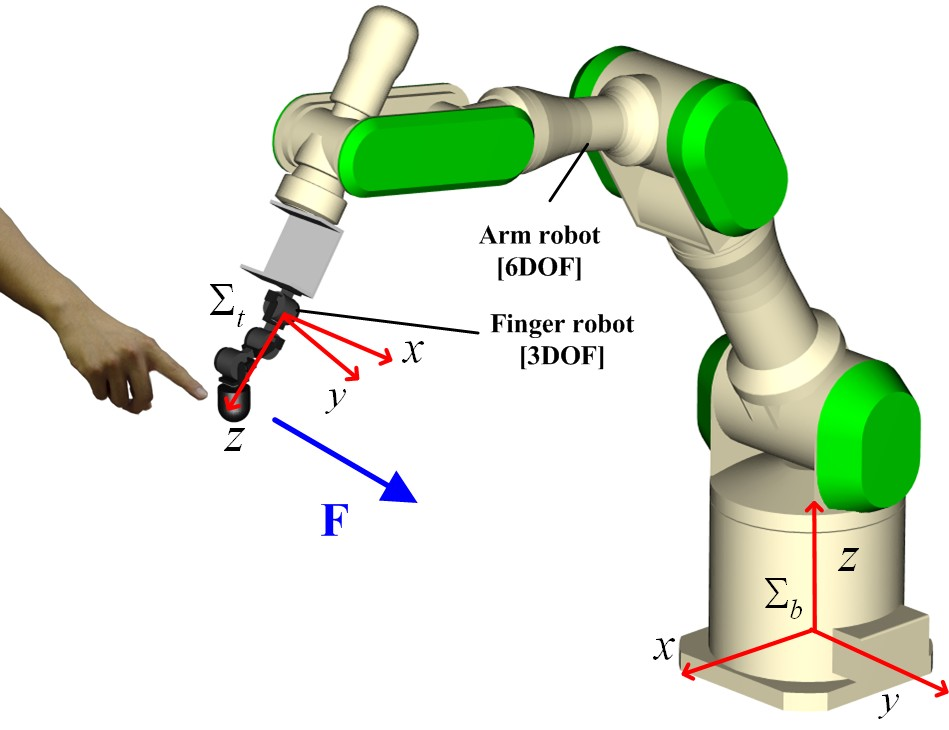 これまでの研究では、人間の上肢に近い冗長性を有する9自由度のフィンガ・アームロボットの協調制御アルゴリズムを提案し、自由空間での運動において自然で滑らかな動きを実現してきた。しかしながら、これまでの手法は自由空間において可操作度の制御を行うものであり、接触作業でのインピーダンス制御を実現する手法は提案されていない。
これまでの研究では、人間の上肢に近い冗長性を有する9自由度のフィンガ・アームロボットの協調制御アルゴリズムを提案し、自由空間での運動において自然で滑らかな動きを実現してきた。しかしながら、これまでの手法は自由空間において可操作度の制御を行うものであり、接触作業でのインピーダンス制御を実現する手法は提案されていない。
フィンガの可操作度とインピーダンス制御を同時に実現することができれば、これまで自由空間で実現してきた自然で滑らかな運動制御を接触作業へ応用することが可能となる。このため、本研究では従来の手法を拘束空間での動的な運動に発展させ、可操作度の制御と三次元空間でのインピーダンス制御を同時に実現する制御手法を提案した。
5. 多脚ロボットの歩行生成
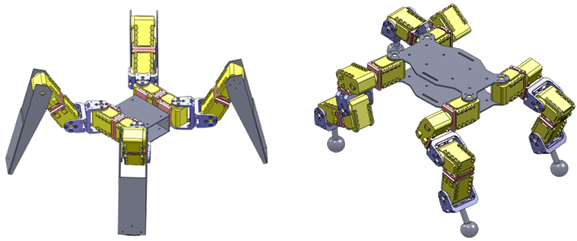 近年,原発事故や災害現場で活躍するレスキューロボットの分野において,劣悪な環境下での安定した歩行が可能な多脚ロボットに注目が集まっている.しかし,従来の研究では坂道や平面などの歩行を主とする研究が多く,段差のような高低差の大きな環境を移動できるような多脚ロボットの研究は進んでいない.
そこで本研究では,段差などの障害物に対応した機構をコンセプトに,多脚ロボットの可動域広域化など機構面の見直し,それに伴う歩行生成を目的とする
近年,原発事故や災害現場で活躍するレスキューロボットの分野において,劣悪な環境下での安定した歩行が可能な多脚ロボットに注目が集まっている.しかし,従来の研究では坂道や平面などの歩行を主とする研究が多く,段差のような高低差の大きな環境を移動できるような多脚ロボットの研究は進んでいない.
そこで本研究では,段差などの障害物に対応した機構をコンセプトに,多脚ロボットの可動域広域化など機構面の見直し,それに伴う歩行生成を目的とする